













機(jī)器狗走梅花樁?自行車能自平衡?騰訊 Robotics X 實(shí)驗(yàn)室研究首次“開箱”
11月20日,騰訊公布了其在移動(dòng)機(jī)器人研究方面的新進(jìn)展:四足移動(dòng)機(jī)器人 Jamoca 和自平衡輪式移動(dòng)機(jī)器人首次對(duì)外亮相。
Jamoca 是國(guó)內(nèi)首個(gè)能完成走梅花樁復(fù)雜挑戰(zhàn)的四足機(jī)器人,而自平衡輪式移動(dòng)機(jī)器人的相關(guān)研究成果還入選了機(jī)器人行業(yè)的頂級(jí)會(huì)議 IROS 2020。
這兩項(xiàng)進(jìn)展均來(lái)自騰訊 Robotics X 實(shí)驗(yàn)室,屬于移動(dòng)方向上的技術(shù)突破,也是機(jī)器人最基礎(chǔ)的能力之一。
騰訊 Robotics X 實(shí)驗(yàn)室于2018年成立,致力推進(jìn)人機(jī)協(xié)作的下一代機(jī)器人研究,打造虛擬世界到真實(shí)世界的載體與連接器。目前實(shí)驗(yàn)室主攻移動(dòng)、靈巧操作和智能體等三大通用機(jī)器人技術(shù)的研究與應(yīng)用,并聚焦于多模態(tài)移動(dòng)機(jī)器人的研發(fā)。
四足移動(dòng)機(jī)器人 Jamoca :能走、能跑、能跳,可挑戰(zhàn)梅花樁復(fù)雜地形
“少林從師數(shù)十冬,梅花樁上練真功。持之以恒銳意修,定可成名蓋群雄。”
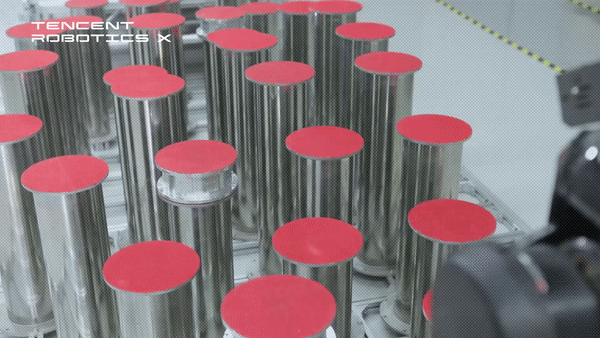
梅花樁是中國(guó)功夫的重要訓(xùn)練道具之一,習(xí)練梅花樁也是武俠小說(shuō)中修煉輕功的基礎(chǔ)。現(xiàn)在,梅花樁上迎來(lái)了一位新的“練功者”—— 騰訊四足移動(dòng)機(jī)器人 Jamoca。
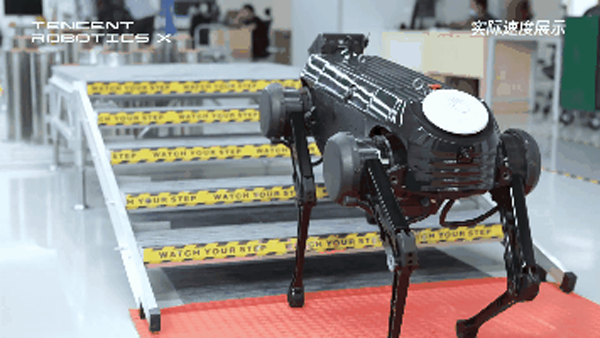
Jamoca 本體基于外部提供的硬件平臺(tái)改裝,重約70公斤,長(zhǎng)1米、寬0.5米、站高0.75米
四足移動(dòng)機(jī)器人,更常見(jiàn)的一個(gè)名字是機(jī)器狗。騰訊 Robotics X 實(shí)驗(yàn)室在外部提供的本體之上,基于自研的機(jī)器人控制技術(shù),為 Jamoca 打造了一個(gè)能應(yīng)對(duì)復(fù)雜環(huán)境的智能大腦。這個(gè)大腦讓 Jamoca 能行走、小跑和跳躍,并賦予了它自主定位和避障的能力。
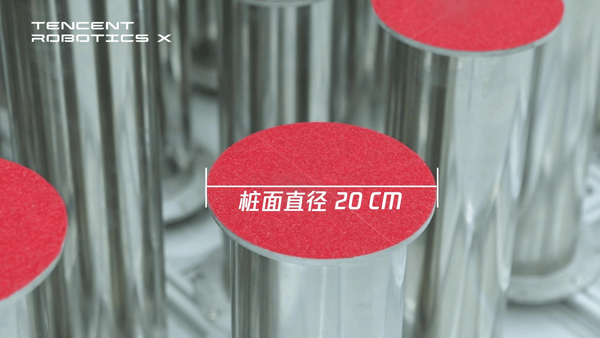
此次 Jamoca 完成的挑戰(zhàn)由高60厘米、呈20°斜面角度的臺(tái)階和鄰樁最大高度差16厘米、間距不等的梅花樁兩部分組成。
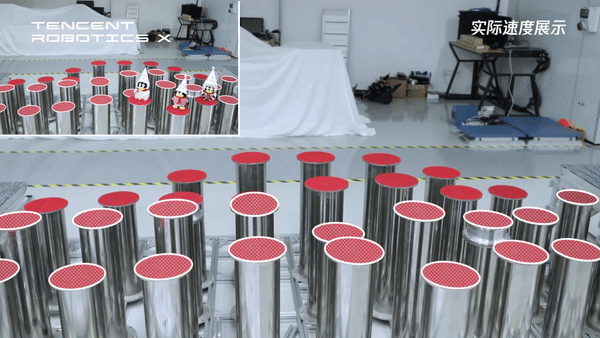
據(jù)騰訊 Robotics X 實(shí)驗(yàn)室研究員介紹,和國(guó)際上其他四足機(jī)器人走木塊的場(chǎng)景比較,此次 Jamoca 所挑戰(zhàn)的梅花樁落腳面積更小、高度更高,并有臺(tái)階的組合,實(shí)現(xiàn)的難度要更大。
其中,考驗(yàn)機(jī)器人移動(dòng)能力的難點(diǎn)主要有兩個(gè):理解梅花樁的排布(包括位置和高度)、選擇最佳落腳點(diǎn)及路線并穩(wěn)定精準(zhǔn)地行走(落腳到梅花樁中心點(diǎn))。
這正對(duì)應(yīng)了實(shí)驗(yàn)室在移動(dòng)技術(shù)方面鉆研的的兩個(gè)核心技術(shù)模塊:感知、運(yùn)動(dòng)規(guī)劃與控制;同時(shí)二者通過(guò)實(shí)驗(yàn)室的另一核心技術(shù)模塊:整機(jī)系統(tǒng)設(shè)計(jì)與搭建,實(shí)現(xiàn)了系統(tǒng)性的集成融合。
從 Jamoca 挑戰(zhàn)的結(jié)果看,騰訊 Robotics X 實(shí)驗(yàn)室已經(jīng)達(dá)到了極高的技術(shù)標(biāo)準(zhǔn)——誤差1厘米內(nèi)的感知定位、根據(jù)環(huán)境進(jìn)行的10毫秒級(jí)路線規(guī)劃、基于動(dòng)力學(xué)的1KHz實(shí)時(shí)力矩控制、梅花樁中心點(diǎn)1厘米內(nèi)的落腳誤差,以及全系統(tǒng)的高度協(xié)同。
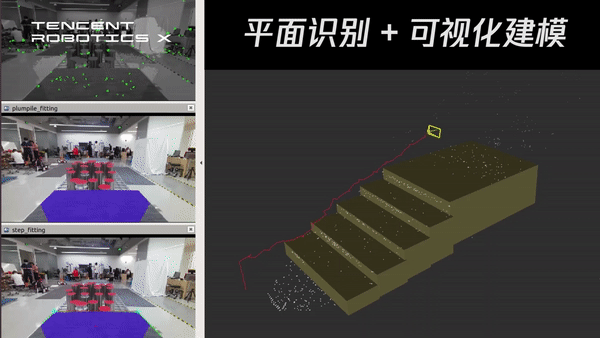
在精準(zhǔn)環(huán)境感知方面,Jamoca 創(chuàng)新性地實(shí)現(xiàn)了魯棒的眼腳標(biāo)定,并利用RGB-D相機(jī)對(duì)周圍環(huán)境進(jìn)行實(shí)時(shí)的感知。通過(guò)特征點(diǎn)匹配的方式,對(duì) Jamoca 自身的運(yùn)動(dòng)軌跡進(jìn)行在線跟蹤,并將基于視覺(jué)的定位信息與基于運(yùn)動(dòng)學(xué)的里程計(jì)信息和 IMU(Inertial measurement unit,慣性測(cè)量單元) 數(shù)據(jù)進(jìn)行融合,提高了定位追蹤的精度和頻率。同時(shí)利用算法識(shí)別和提取出臺(tái)階和梅花樁的表面區(qū)域范圍和中心點(diǎn)位置,將定位和識(shí)別的數(shù)據(jù)進(jìn)行融合,從而重建出整個(gè)三維運(yùn)動(dòng)場(chǎng)景。
在最優(yōu)運(yùn)動(dòng)線路規(guī)劃和實(shí)時(shí)的運(yùn)動(dòng)控制方面,Jamoca 基于感知系統(tǒng)實(shí)時(shí)感知到的機(jī)器人本體及梅花樁位置信息,基于質(zhì)心動(dòng)力學(xué),實(shí)現(xiàn)在線的質(zhì)心軌跡生成和落腳點(diǎn)規(guī)劃。在保證機(jī)器人的四條腿可以安全地踏到下一步的梅花樁的同時(shí),優(yōu)化出一條本體移動(dòng)長(zhǎng)度最短、綜合耗力最小的運(yùn)動(dòng)軌跡,并且可以在線持續(xù)地進(jìn)行上述運(yùn)動(dòng)規(guī)劃。
同時(shí),基于實(shí)時(shí)的本體狀態(tài)估計(jì),Jamoca 能夠結(jié)合質(zhì)心動(dòng)力學(xué)模型來(lái)構(gòu)建優(yōu)化問(wèn)題,實(shí)時(shí)求解機(jī)器人足端所需的地面反作用力,并結(jié)合反饋控制實(shí)現(xiàn)精準(zhǔn)魯棒的實(shí)時(shí)力控,可完成行走、對(duì)角小跑以及跳躍等的運(yùn)動(dòng)控制。
不同于預(yù)先設(shè)計(jì)好規(guī)則之后做重復(fù)的運(yùn)動(dòng)的工業(yè)機(jī)器人,Robotics X 實(shí)驗(yàn)室更關(guān)注機(jī)器人有意識(shí)、有判斷的自主特性研究,目的就是要在有很大不確定性的動(dòng)態(tài)環(huán)境里,能夠?qū)崿F(xiàn)機(jī)器人的自主判斷、自主決策,并自主完成任務(wù)。
現(xiàn)階段,Jamoca 主要用于實(shí)驗(yàn)室內(nèi)部科研實(shí)驗(yàn)。它的在線環(huán)境感知、最優(yōu)運(yùn)動(dòng)規(guī)劃和實(shí)時(shí)運(yùn)動(dòng)控制等能力,未來(lái)將幫助騰訊其他機(jī)器人產(chǎn)品更好地適應(yīng)復(fù)雜的現(xiàn)實(shí)環(huán)境。
靜止、行進(jìn)均能自主保持平衡的輪式機(jī)器人
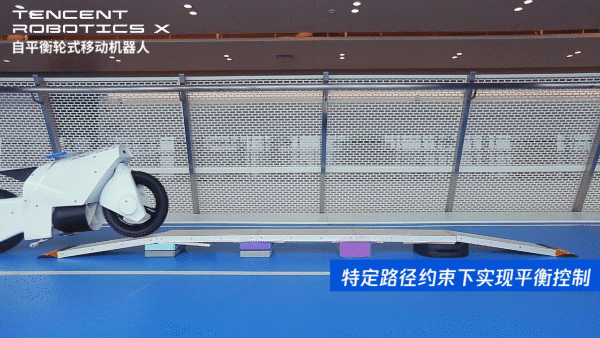
此次一同亮相的,還有一款自平衡輪式移動(dòng)機(jī)器人,也可稱之為自平衡自行車,是騰訊 Robotics X 實(shí)驗(yàn)室的首個(gè)整機(jī)自研機(jī)器人。
它在傳統(tǒng)輪式移動(dòng)機(jī)器人的基礎(chǔ)上,增加了動(dòng)量輪及其電機(jī)驅(qū)動(dòng)系統(tǒng),使得機(jī)器人可以在靜止及行進(jìn)狀態(tài)下均保持平衡不倒。
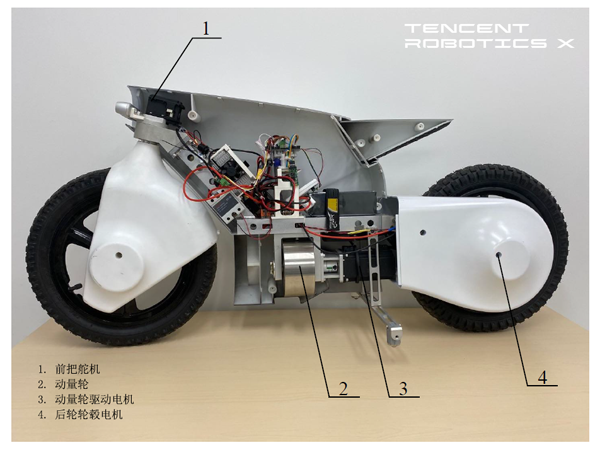
自平衡輪式移動(dòng)機(jī)器人的硬件平臺(tái)完全由騰訊Robotics X自研,重約15公斤,長(zhǎng)1.15米,高0.52米
它的控制能力又可以細(xì)分為行進(jìn)中的動(dòng)態(tài)自平衡和停止行進(jìn)時(shí)的靜態(tài)自平衡。行進(jìn)中的動(dòng)態(tài)自平衡是依靠前把轉(zhuǎn)動(dòng)進(jìn)而帶動(dòng)車身的轉(zhuǎn)動(dòng)實(shí)現(xiàn),而停止行進(jìn)時(shí)的靜態(tài)自平衡則采用動(dòng)量輪力矩平衡技術(shù),應(yīng)用角動(dòng)量守恒的原理實(shí)現(xiàn)自平衡控制。

依靠平衡算法,即使受到一定的外界干擾,騰訊自平衡輪式移動(dòng)機(jī)器人仍然可以在保持自平衡狀態(tài)的同時(shí),實(shí)現(xiàn)平穩(wěn)地向前行駛。

機(jī)器人在不同的路面狀況下,例如遇到上下坡時(shí),也都表現(xiàn)出了較好的運(yùn)動(dòng)能力和平衡性能。甚至對(duì)于行駛路徑上存在特定約束的情況,比如沿著獨(dú)木橋行駛的場(chǎng)景,它也能從容應(yīng)對(duì)。
在此前舉行的機(jī)器人行業(yè)國(guó)際頂會(huì)IROS 2020上,騰訊 Robotics X 實(shí)驗(yàn)室發(fā)布的兩篇平衡控制方向的Oral論文,就來(lái)自于該機(jī)器人項(xiàng)目。
IROS由IEEE(電氣和電子工程師協(xié)會(huì))和RSJ(日本機(jī)器人學(xué)會(huì))共同舉辦,是機(jī)器人領(lǐng)域三大國(guó)際頂級(jí)會(huì)議之一,今年的主題為Consumer Robots and Our Future,接收來(lái)自機(jī)器人與人工智能、機(jī)器人視覺(jué)、傳感器、云機(jī)器人等相關(guān)領(lǐng)域的研究。
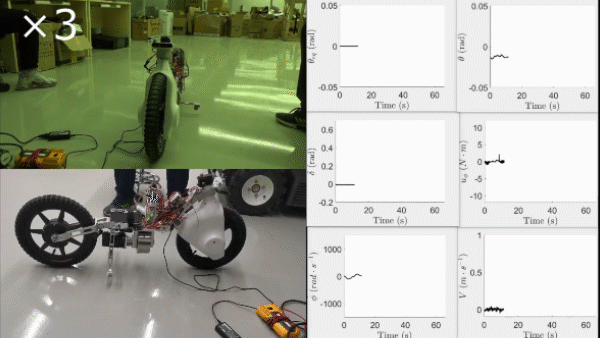
在第一項(xiàng)研究《自平衡輪式移動(dòng)機(jī)器人的非線性平衡控制:設(shè)計(jì)與實(shí)驗(yàn)》中,騰訊 Robotics X 實(shí)驗(yàn)室與紐約大學(xué)合作研究了自平衡輪式移動(dòng)機(jī)器人的動(dòng)靜態(tài)平衡控制的穩(wěn)定性問(wèn)題。
在傳統(tǒng)輪式移動(dòng)機(jī)器人的基礎(chǔ)上,騰訊 Robotics X 實(shí)驗(yàn)室增加了動(dòng)量輪和電機(jī)驅(qū)動(dòng)系統(tǒng),使用了級(jí)聯(lián)與阻尼配置的無(wú)源控制(Interconnection and Damping Assignment - Passivity Based Control, IDA-PBC)方法,并應(yīng)用李雅普諾夫理論從理論上證明了自平衡輪式移動(dòng)機(jī)器人的閉環(huán)系統(tǒng)穩(wěn)定性。
此外,實(shí)驗(yàn)室還在自建平臺(tái)上證明了新控制器效果良好,能讓機(jī)器人保持自平衡,并有一定的抗外界干擾能力。
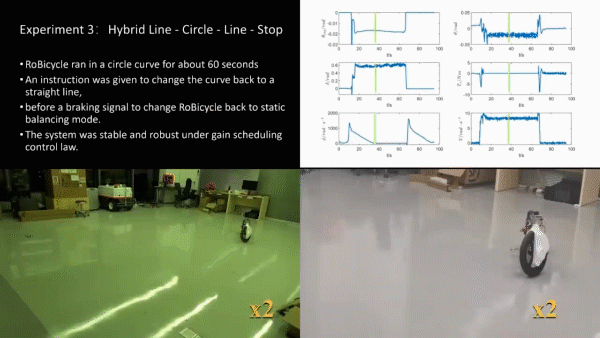
而在另一項(xiàng)研究《自平衡輪式移動(dòng)機(jī)器人平衡的增益規(guī)劃控制器設(shè)計(jì)》中,不同于傳統(tǒng)方法將靜態(tài)和動(dòng)態(tài)平衡區(qū)分對(duì)待,研究團(tuán)隊(duì)建立了可以同時(shí)描述輪式移動(dòng)機(jī)器人動(dòng)態(tài)特性和靜態(tài)特性的統(tǒng)一的數(shù)學(xué)模型。

基于同一個(gè)模型,動(dòng)態(tài)平衡和靜態(tài)平衡對(duì)不同驅(qū)動(dòng)輸入的依賴程度不同,無(wú)法使用同樣的控制參數(shù)。因此,研究團(tuán)隊(duì)使用基于增益規(guī)劃(Gain Scheduling)的控制方法。該控制方法可在兩種情況下都保持輪式機(jī)器人的平衡,這一點(diǎn)在理論和實(shí)驗(yàn)中都得到證明。
移動(dòng)機(jī)器人的技術(shù)框架
騰訊 Robotics X 實(shí)驗(yàn)室主攻機(jī)器人移動(dòng)、靈巧操作和智能體等三大核心通用技術(shù)的研究與應(yīng)用。
其中,移動(dòng)是機(jī)器人最基礎(chǔ)的能力之一,此次發(fā)布的兩項(xiàng)進(jìn)展就屬于移動(dòng)方向。
而移動(dòng)方向又可分為四個(gè)技術(shù)模塊:機(jī)械設(shè)計(jì)、感知、運(yùn)動(dòng)規(guī)劃與控制、整機(jī)系統(tǒng)設(shè)計(jì)與搭建。通俗的說(shuō),前三者分別是機(jī)器人的軀干、眼睛和大腦,最后一項(xiàng)則是它的各“器官”協(xié)調(diào)的能力。
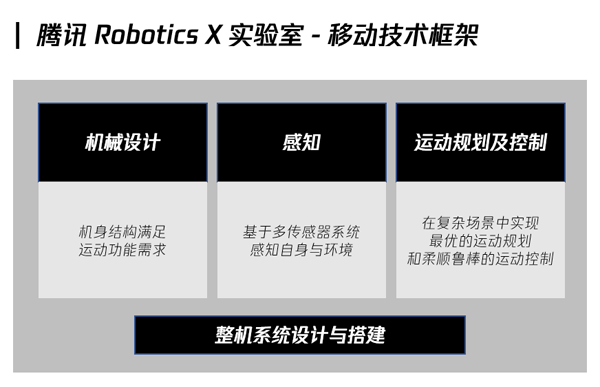
算法自研的 Jamoca 正是結(jié)合了騰訊在感知、運(yùn)動(dòng)規(guī)劃與控制兩方面的研究成果。而整機(jī)自研的自平衡輪式移動(dòng)機(jī)器人則可以視作騰訊在機(jī)器人的機(jī)械設(shè)計(jì)和整機(jī)系統(tǒng)設(shè)計(jì)與搭建方向能力上的一個(gè)里程碑項(xiàng)目。
騰訊 Robotics X 與騰訊 AI Lab 實(shí)驗(yàn)室主任張正友博士表示:“移動(dòng)或運(yùn)動(dòng)能力,是機(jī)器人最核心、也是最基本的能力之一,決定了它能去到什么場(chǎng)景,做什么事情,未來(lái)有什么樣的想象力。我們很高興能看到這兩項(xiàng)進(jìn)展,并將繼續(xù)深入探索機(jī)器人的通用能力,為虛擬到真實(shí)世界搭建一個(gè)有力的橋梁。”


















